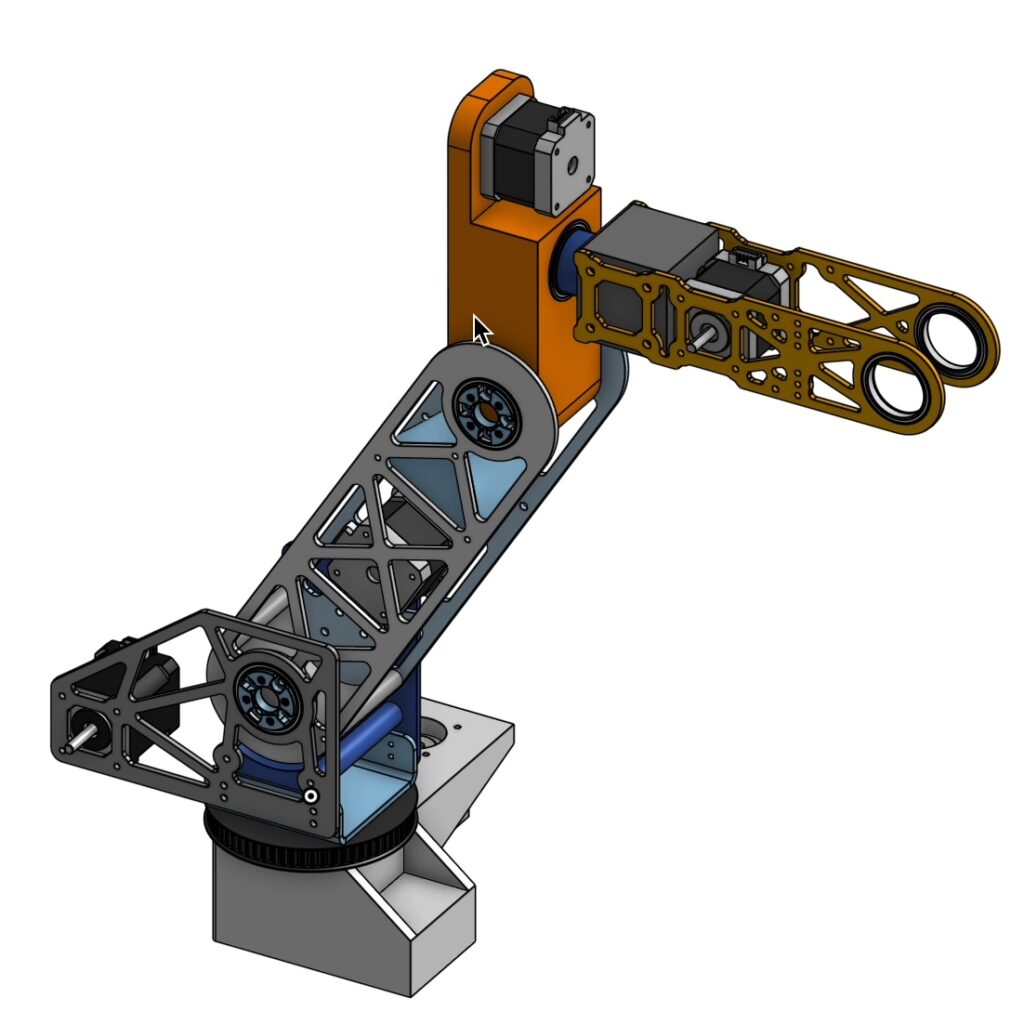
Current work in progress. Robotic arm with six degrees of freedom, designed from scratch. Actuators consist of NEMA 17 stepper motors and custom harmonic gearboxes. Controlled with an Arduino running custom inverse kinematic code.
Current work in progress. Robotic arm with six degrees of freedom, designed from scratch. Actuators consist of NEMA 17 stepper motors and custom harmonic gearboxes. Controlled with an Arduino running custom inverse kinematic code.